
Et nytt våpen for å detektere skadet not
Med støtte fra FHF i ryggen skal Mohn Technology forenkle en utfordring som stadig har blitt et større problem i havbruksnæringen.
Denne artikkelen er tre år eller eldre.
Mohn Technology holder for tiden på med et FHF-støttet prosjekt der de utvikler en autonom inspeksjonsdrone for havbruksnæringen som automatisk detekterer skadet not og rapporterer funn, samt posisjon på skaden.
Kyst.no skrev blant annet i september at Fiskeridirektoratet har gått gjennom åtte tilsynssaker der notinspeksjonen med ROV ikke oppdaget faktiske skader på noten.
Store utfordringer med inspeksjonene
Magnus Myklebost i Mohn Technology sier til Kyst.no at selskapet har lang erfaring med bruk av maskinsyn til vanskelige oppgaver. I forbindelse med andre prosjekter mot fiskeri og havbruksnæringen fikk de god kontakt med oppdrettere, og de ble forklart om utfordringene knyttet til inspeksjon.

- Hver merd er jo tusenvis av kvadratmeter og det er svært utfordrende å opprettholde konsentrasjon og vite eksakt hvor man har vært i merden for en ROV-operatør, påpeker Myklebost.
Han sier de har hørt mange historier om skader som har blitt oppdaget av dykkere rett etter ROV-inspeksjoner eller inspeksjon som ble gjort fra vaskerigg samtidig med notvask.
- Vi tenker også at dronen kan ha en sensorpakke som konfigureres av hver enkelt bruker. Om man feks er interessert i miljøparametere, vil disse kunne logges over hele notarealet slik at man får en detaljert rapport om miljøet i hele merden.
Tar i bruk kunstig intelligens
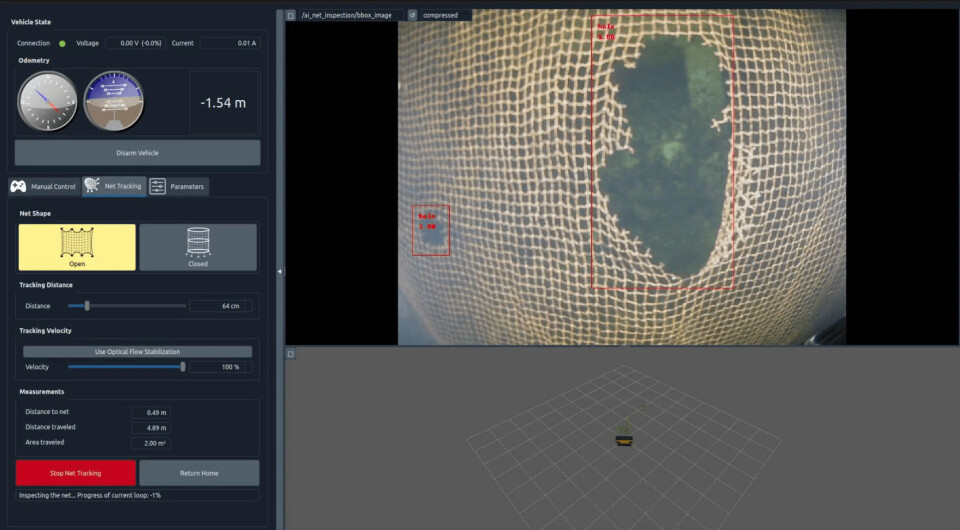
Mohn Technology skal med sin drone benytte en kombinasjon av konvensjonelt maskinsyn som ser etter spesielle mønstre i pikslene og kunstig intelligens (AI) i deres algoritmer. I en oppdrettsmerd er det ikke bare regelmessig notvegg, det er tau, utstyr, groe og fremmedelementer som vil forstyrre normalt maskinsyn. Selskapet mener det derfor er nødvendig med bruk av AI-basert maskinsyn for å ikke enten ende opp med ekstremt mange falske positive eller så strenge kriterier for deteksjon at man går glipp av mindre skader.
- Når man utvikler maskinsyn med kunstig intelligens markerer man bilder av skadet not og kjører det gjennom en treningsalgoritme. Her bør man ha titusenvis av varierte bilder med forskjellig lys- og vannkvalitet. Treningen foregår på en kraftig server hos oss i Bergen, mens det resulterende programmet kan kjøres lokalt i dronen. Når dronen detekterer en skade vil den lagre det som en bildeserie med informasjon om posisjonen til skaden, i tillegg til video av hele inspeksjonen for evt. manuell gjennomgang, sier Myklebost.
Dette skal gjøre at man enkelt kan vurdere skadene og planlegge en effektiv reparasjon. Maskinsynet detekterer skader ned i ett maskebrudd, så om man får tidlig varsel minimerer man risiko for rømning og forenkler planlegging av vedlikehold.
Les også: ROV-operatør om dårlig oppdagelse av hull i not: - Glad for fokuset
Ikke nok med dagens regime
Mohn Technology mener utfordringene med dagens inspeksjonsregime er flerdelt. Ved manuell inspeksjon med ROV påpeker Myklebost at det kreves en svært dyktig operatør som må holde seg konsentrert i timesvis.
- Det er svært vanskelig å vite nøyaktig hvor man allerede har inspisert i merden. Da risikerer man å overse feil på felter som ikke inspiseres og hvis man ikke holder korrekt avstand til noten 100 prosent av tiden risikerer man å gå glipp av små skader.
Videre trekker han frem at det ikke er alle som lagrer ordentlig dokumentasjon av merden, da er det umulig å gå tilbake å kontrollere når skaden har skjedd. Med deres system understreker han at maskinsynet ikke vil la seg utmatte av timesvis med video av notvegg.
- Navigasjonssystemet sørger for nøyaktig posisjonering og avstand til not for optimal inspeksjon. Det vil lagres dokumentasjon fra hver inspeksjon og bildene linkes til posisjon i merden. Alt i alt er vi sikre på at denne typen teknologi vil gi sikkerheten mot fiskerømming et betydelig løft, påpeker han.
Les også: - En rekke utfordringer knyttet til notinspeksjoner med ROV
Viktig støtte til prosjektet
Støtten fra FHF forteller Myklebost er svært viktig for selskapet i utviklingen.

- Nåløyet for støtte er lite, så det gir oss en boost at de har valgt å satse på oss.
Via referansegruppen til prosjektet får selskapet også tilgang til svært mye erfaring og kompetanse fra FHF og velkjente oppdrettere.
- Dermed er vi og FHF sikret at utviklingen fører til et produkt bransjen har behov for og troen på. I tillegg til dette gjør det økonomiske bidraget vårt i stand til å ansette nye utviklere og gjennomføre flere tester. Økt satsning hos oss fører til bedre produkter til havbruksnæringen, både i dette prosjektet og fremtiden. Vi har faktisk akkurat utlyst enda en stilling som går på webutvikling rettet mot havbruksnæringen nå, forteller han.
Nærmer seg en pilot
Mohn Technology håper å være klar for pilottesting med sin drone hos utvalgte samarbeidspartnere om rundt et år. Myklebost sier de gjør denne pilottestingen i et begrenset omfang for å ha kapasitet til å følge opp tett underveis og kunne forbedre produktet fortløpende.
- På denne måten får vi et mye bredere erfaringsgrunnlag og datasett til maskinlæring enn vi ville gjort om vi kun testet selv i Bergen. Dronen vår går på batteri og kan operere autonomt med og uten kabel, og i tillegg kjøres semi-autonomt og manuelt med kabel. Planen vår er at pilotproduktet har hardware til å være fullstendig autonomt, men at vi gir brukerne anledning til å ta det i bruk med semi-autonome egenskaper tidligere.
Dette mener Myklebost er et stort steg opp fra dagens løsning, ved at dronen selv holder orden på avstand til not og hvor den har vært, samt automatisk inspeksjon av notveggen. Likevel vil dronen i tidligste steg av pilottestingen kreve en operatør til å overse prosessen og muligens hjelpe den forbi noen hindringer.
- Jeg tror innen få år vil autonome droner inspisere de fleste norske anlegg da dette definitivt er en oppgave som vil nye godt av automatisering. Men før vi kommer dit må vi som utvikler utstyret bevise at teknologien er moden og robust, og at nøyaktigheten er bedre enn dagens teknologi, forteller han avslutningsvis.











