
Utvikler roboter som skal bidra til ubemannet drift av lokaliteter
Utvikling av ny robotteknologi skal bidra til at krevende havbruksoperasjoner kan utføres uten bemanning på lokalitet. - Innovasjonene vil føre til et kvantesprang innen nye løsninger for robotisering og fjerndrift, forteller Per Rundtop, forsker i Sintef Fiskeri og Havbruk.
Denne artikkelen er tre år eller eldre.
Gjennom prosjektet ARTIFEX skal et system av farkoster i samspill, utføre operasjoner over og under vann på en helt ny måte. I prosjektet skal det utvikles teknologi som muliggjør at daglige og periodiske operasjoner for inspeksjon, vedlikehold og reparasjon, kan utføres fra et landbasert kontrollsenter og uten bemanning på lokaliteten.
- Innovasjonene vil kunne resultere i et paradigmeskifte for hvordan drift og operasjon av oppdrettsanleggene utføres, forteller Rundtop.
Sikrer driften
En av hovedmålsettingene er å sikre driften av anlegg på eksponerte lokaliteter.
- På disse lokalitetene kan man ofte ha værbegrensinger for de fleste operasjoner, og tillater ikke været dette må de gjerne utsettes, noe som igjen fører til brudd på akvakulturforskriften og daglige rutiner, forklarer Rundtop.

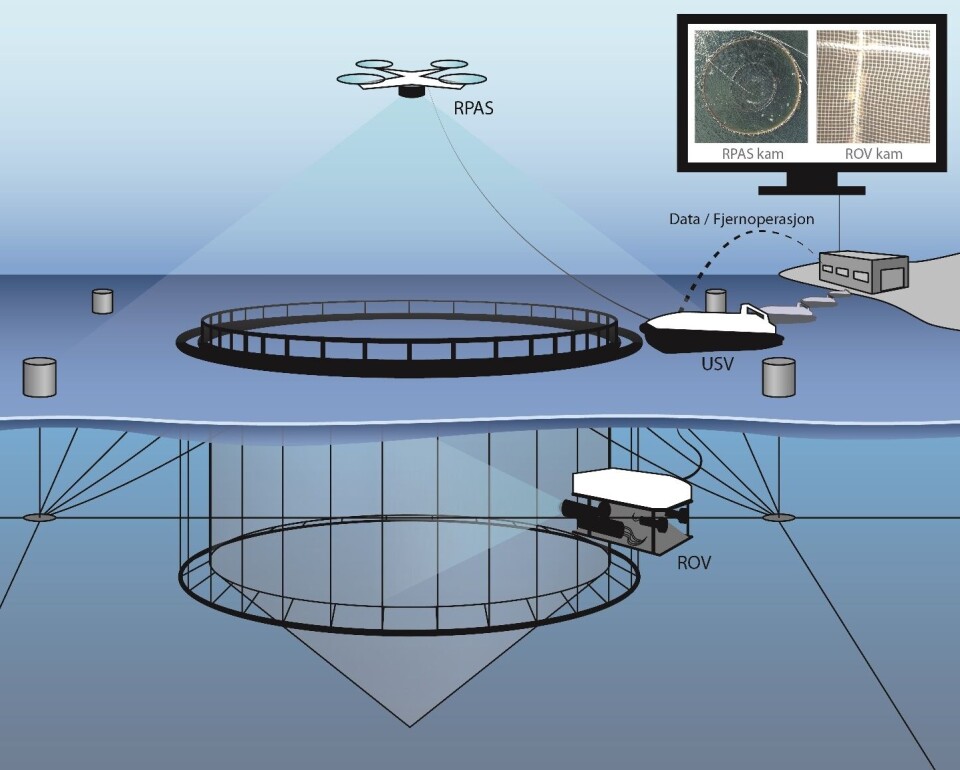
Prosjektet tar utgangspunkt i maritime «state of the art» farkoster, og skal ved samspill mellom disse framskaffe et robust og fleksibelt system. Prosjektet bygger på bruk av Unmanned Surface Vehicle (USV) som plattform og bærer av Remotely Operated Vehicle (ROV) for undervannsoperasjoner, og Remotely Piloted Aircraft Systems (RPAS) for inspeksjonsoppgaver fra luften.
- USVen vil forflytte seg mellom ulike lokaliteter og landbasen. Prosjektresultatene vil legge til rette for produkter og tjenester som muliggjør ubemannet drift av oppdrettsanlegg ved hjelp av fjernstyring, autonome systemer og uten risiko for personell. Et av prosjektets viktigste målsettinger er å kunne gjennomføre operasjonene under tøffere værforhold enn det som er mulig med dagens teknologi og metoder, og dermed legge til rette for bruk av mer eksponerte lokaliteter, sier han.
I tillegg til å utvide værvinduet for bedre drift av eksisterende lokaliteter ved å være røkterens forlengede arm og håndverker.
- De ulike delsystemene vil så integreres i en prototype for testing og validering på fullskala oppdrettsanlegg. Næringen bli stadig mer teknologisk. Fjernstyring og roboter blir mer og mer brukt, konkluderer han.
Bred tilnærming
Innen området undervannsteknologi/fjernstyring/robotisering har Sintef flere prosjekter i tillegg til nevnte ARTIFEX som eksempelvis MerdROV, SFI Exposed og REMOTE .
- Hvilke resultater har dere sett i forhold til de undersøkelsene dere har utført?
- Om man ser f.eks. på det avsluttede prosjektet MerdROV har vi fått resultater som legger grunnlaget for videreutvikling til kommersielle produkter, informerer han.
Prosjektene de jobber med er samarbeidsprosjekter og ifølge Rundtop har samarbeidet fungert bra og gitt fruktbare resultater.
- Vi er forskningspartner og prosjektleder, og utfører ofte oppgaver i tett samarbeid med øvrige prosjektpartnere. Typiske oppgaver er konseptstudie, analytiske studier og beregninger, design av feltforsøk, analyse av data, utvikling av kjerneteknologi og algoritmer for dataanalyse og kontrollsystemer, legger han til.
Industripartnerne viser han til at ofte er premissgivere og sørger for implementasjon/integrering av teknologien, samt ta prosjektresultatene videre til kommersielle produkter.
- Feltforsøk i fullskala er ofte en viktig del av prosjektene, og har tradisjonelt vært utført som et samarbeid mellom oss og industripartnerne i prosjektet, informerer han.
I prosjektet vil det utføres forskning innen de fire hovedområdene:
- Farkostdesign og ombordutstyr
- Autonome systemer og operatørinteraksjon
- Luftoperasjoner
- Undervannsoperasjoner
Prosjektet startet opp like etter påske skal være ferdig i løpet av 2018. SINTEF er prosjektleder og har forskningsoppgaver knyttet til alle de fire hovedområdene. Maritime Robotics er prosjekteiere og Argus Remote Systems, Lerow, ACE testlab, NTNU og Wavec er samarbeidspartnere.











