Hvordan navigere under vann i en merd?
I en artikkelserie som begynte i siste nummer av Norsk Fiskeoppdrett, tar SINTEF-forskere for seg undervannsrobotikk i havbruksoperasjoner.
Denne artikkelen er tre år eller eldre.
I løpet av få år har ubemannede undervannsfarkoster som f.eks. ROV-er gått fra å være et uvanlig innslag i havbruksnæringen, til å bli et uunnværlig verktøy for mange oppdrettsselskap.
- Til tross for at ROV-teknologi er godt integrert i bransjen, har man enda til gode å utnytte dets fulle potensiale. Denne artikkelen er den første av tre i en artikkelserie der vi presenterer SINTEF Oceans teknologiske bidrag for å introdusere ROV-operasjoner som er bedre tilpasset havbruk, med en høyere grad av autonomi og større datafangst, skriver forskerne.
I den første av artiklene presenteres løsninger for å estimere ROV-ens absolutte posisjon i merden, samt posisjon relativt til nota.
- Nøyaktig navigasjon i hele merdrommet er avgjørende for å kunne automatisere ROV-operasjoner i havbruk. Dette kan f.eks. være autonom inspeksjon av not, automatisert notvask og georeferert tagging av observasjoner og målinger. Gjennom resultater fra ulike prosjekter har SINTEF Ocean demonstrert ulike metoder for måling og estimering av posisjon i merd, skriver de.
Kamera – billig og bra
De påpeker bl.a. at fordelene og begrensningene til de ulike metodene tyder på at en løsning som fusjonerer data fra ulike sensorer i et kombinert system, vil være gunstig med tanke på nøyaktighet og robusthet.
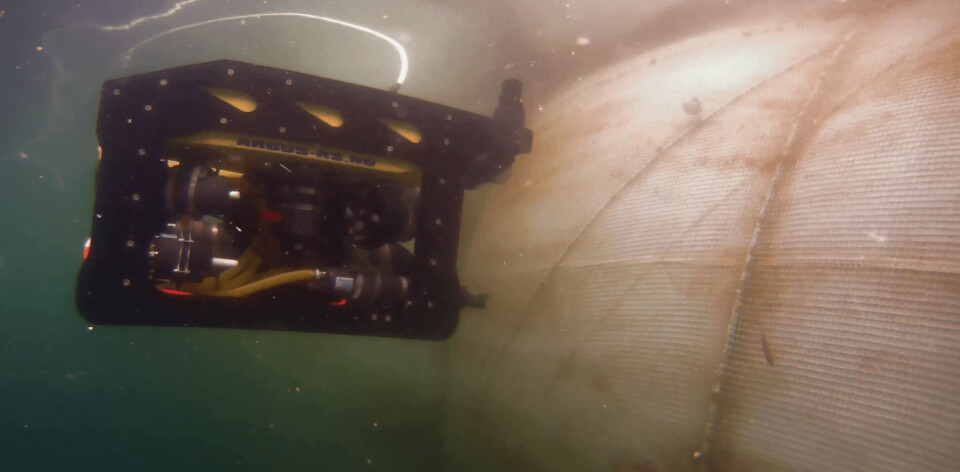
- Ved å bruke bildebehandlingsmetoder kan kamera være et hjelpemiddel for å navigere relativt til nota som både er billig og lett tilgjengelig. SINTEF Ocean har derfor også hatt en satsning på kamera for navigasjon i merd, skriver de.
I artikkel 2 av denne artikkelserien – som kommer i Norsk Fiskeoppdrett nr 12 - vil SINTEF Ocean presentere komplette kontrollsystemer som tar i bruk navigasjonsmetodene presentert i denne artikkelen for å gjøre banefølging i merd, autonomt traversere not, samt opprettholde sin egen posisjon ved hjelp av DP.