

Testing av undervannssensor for sanntids overvåking av lakselus
I prosjektet «Real-time detection of free-swimming sea lice larvae» (e-Lice), tar Akvaplan-niva og partnere i bruk avanserte undervanns-sensorer og KI for å identifisere og kvantifisere lakselus i vannsøylen.
Det melder Akvaplan-niva i en pressemelding.
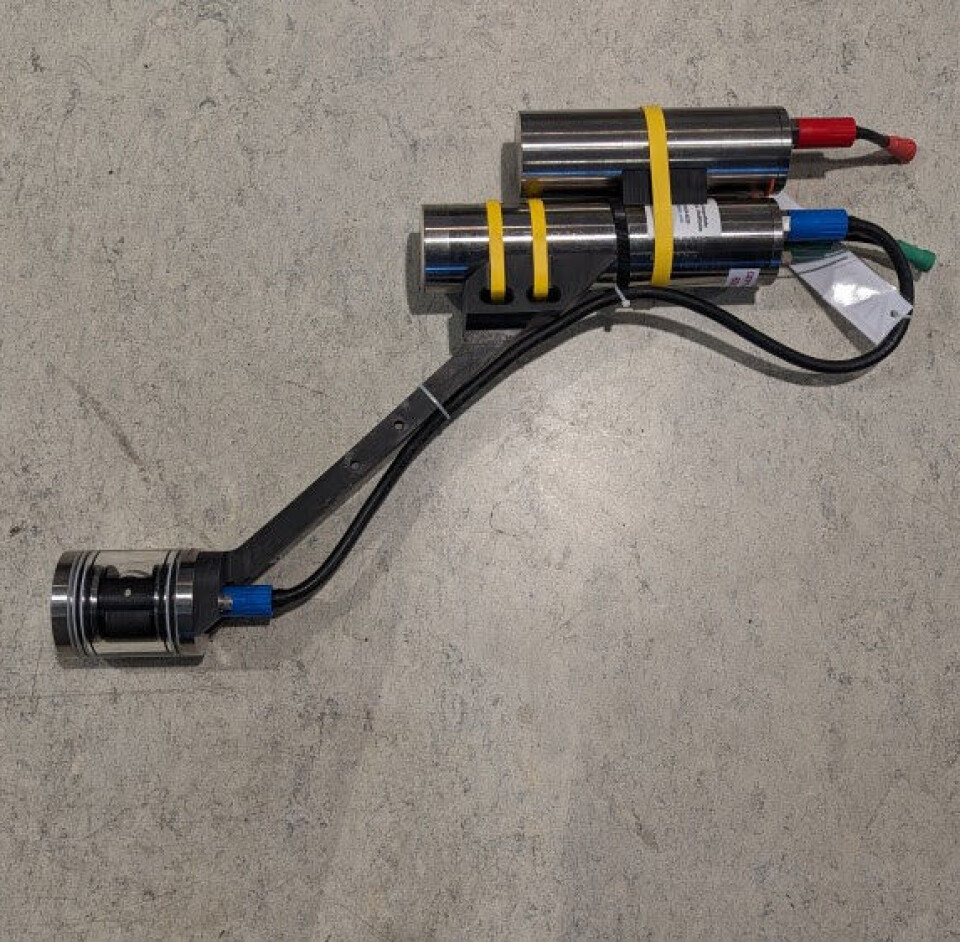
I oktober ble det første forsøk gjennomført i prosjektet, en testing av undervanns-sensoren UVP6 og utvikling av en algoritme for å klassifisere lakselus.
I eksperimentet var Ragnhild Pettersen fra Akvaplan-niva ansvarlig for å montere UVP6, utviklet av selskapet Hydroptics, i en 430 liters test-tank på VESO Aqualab. Voksne lakselus hunner med egg-streng hadde blitt samlet inn uken før fra et lakseslakteri og lusene ble klekket på VESO Aqualab.
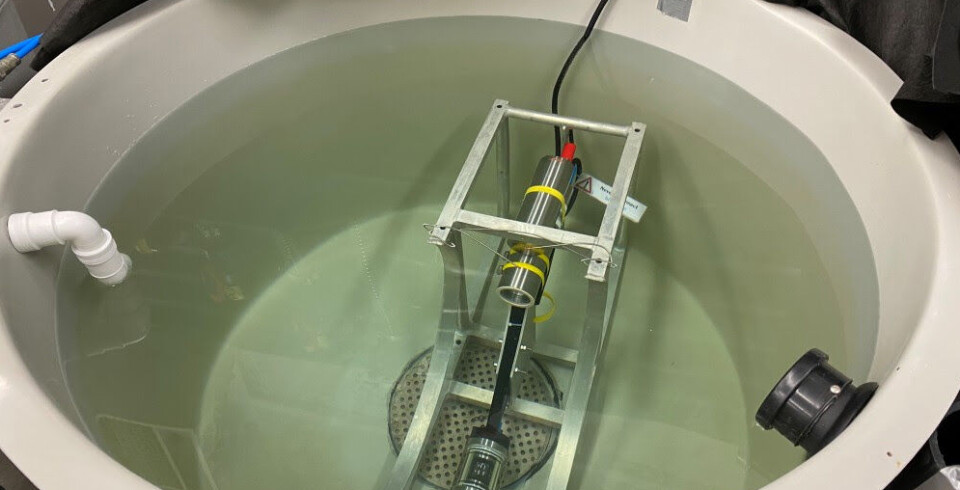
Første dagen av eksperimentet så ble det tilsatt høye konsentrasjoner av lakselus i nauplius stadiet (0,5-0,7 mm) i test tanken. Lakselusene ble holdt i tanken slik at de kunne utvikle seg til kopepod stadiet. Denne prosessen tar vanligvis tre dager ved en vanntemperatur på 12oC. På dag tre var alle de innsamlede eggene klekket og tilsatt i test tanken, som nå inneholdt lus i ulike stadier.
Dette ble gjort for å øke tettheten av lus som skulle passere UVP6 sensoren for å oppnå flest mulig bilder. Fra dag tre så var altså lakselusa i tanken en mix av lus i stadiene nauplius og kopepoder. UVP6 var plassert i tanken i hele 15 dager mens den kontinuerlig foretok fotografering i vannsøylen. Resultatet av dette ble tusenvis av bilder som var avgjørende for å utvikle algoritmen som skal anvendes for å klassifisere lakselus i e-Lice prosjektet.

- Objektene i sjøvann som fanges opp av UVP6 sensoren kan være levende dyr og plankton (dyreplankton og fiskelarver) eller partikler i vannet. Siden det mange forskjellige former av både levende dyr, plankton og partikler i vannet er det viktig av fritt-svømmende livsstadier av lakselus kartlegges og klassifiseres på riktig måte. For å løse denne utfordringen så har vi nå utviklet en KI og Computer Vision basert algoritme for automatisk deteksjon og klassifisering av objekter som fanges opp av UVP6, i sanntid, uttaller forskerene.
- Algoritmene som er tatt i bruk er av to ulike slag: 1) klassiske maskinlæringsalgoritmer og 2) deep learning algoritmer for å validere klassifiseringen. Maskinlæringsalgoritmen er basert på en eksisterende modell designet spesifikt for UVP6. Basert på våre forsøk finner vi at vår algoritme er i stand til å detektere og klassifisere lakselus med 91% nøyaktighet, legger de til.
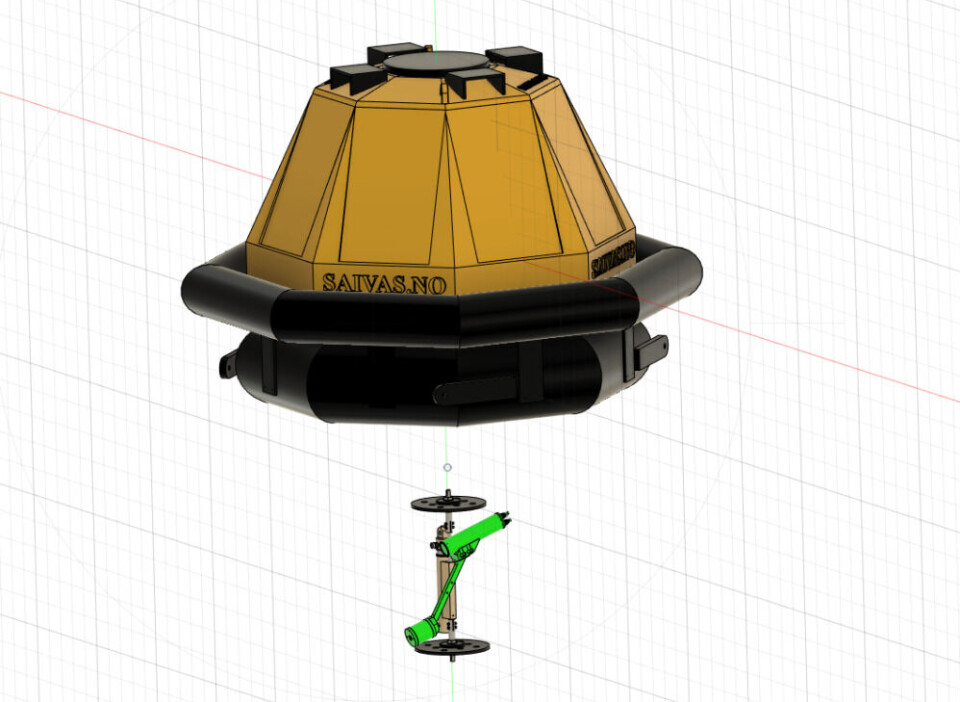
Neste steg i prosjektet vil være å implementere UVP6 i en rigg som skal testes i felt utenfor Tromsø tidlig i 2024. Deretter plasseres riggen med UVP6 ved en strategisk valgt fjordlokasjon langs Norskekysten for å identifisere og kvantifisere frittsvømmende lakselus.
Prosjektet er finansiert av FHF, ledet av Akvaplan-niva ved Lionel Camus. Partnere er VESO Aqualab, Nova Sea and Kongsberg Discovery.











